Invited Speaker

Fusaomi Nagata
Professor, Department of Mechanical Engineering, Faculty of Engineering, Sanyo-Onoda City University, JapanSpeech Title: Hyper Cutter Location Data-based Robot Interface for Standardization
Abstract: Widely known cutter location source (CLS) data can be generated by using the main processors of various released CAD/CAM systems. CLS data, which are intermediate data, are finally transformed into numerical control (NC) data for various types of NC machine tools. Originally, CLS data were standardized only for NC machine tools. On the other hand, almost industrial robots have not provided the data interface available for it. This paper proposes hyper CLS (HCLS) data and its robot interface for robots working in industrial production lines to enhance functionality by applying effective technologies such as AI, visual feedback control, and cooperative control. The effectiveness and usability are demonstrated through experiments using small-sized articulated robot named DOBOT Magician and MG400. Figure1 shows a sequence control scene sing SET and GET statements for handshake communication available in HCLS data.
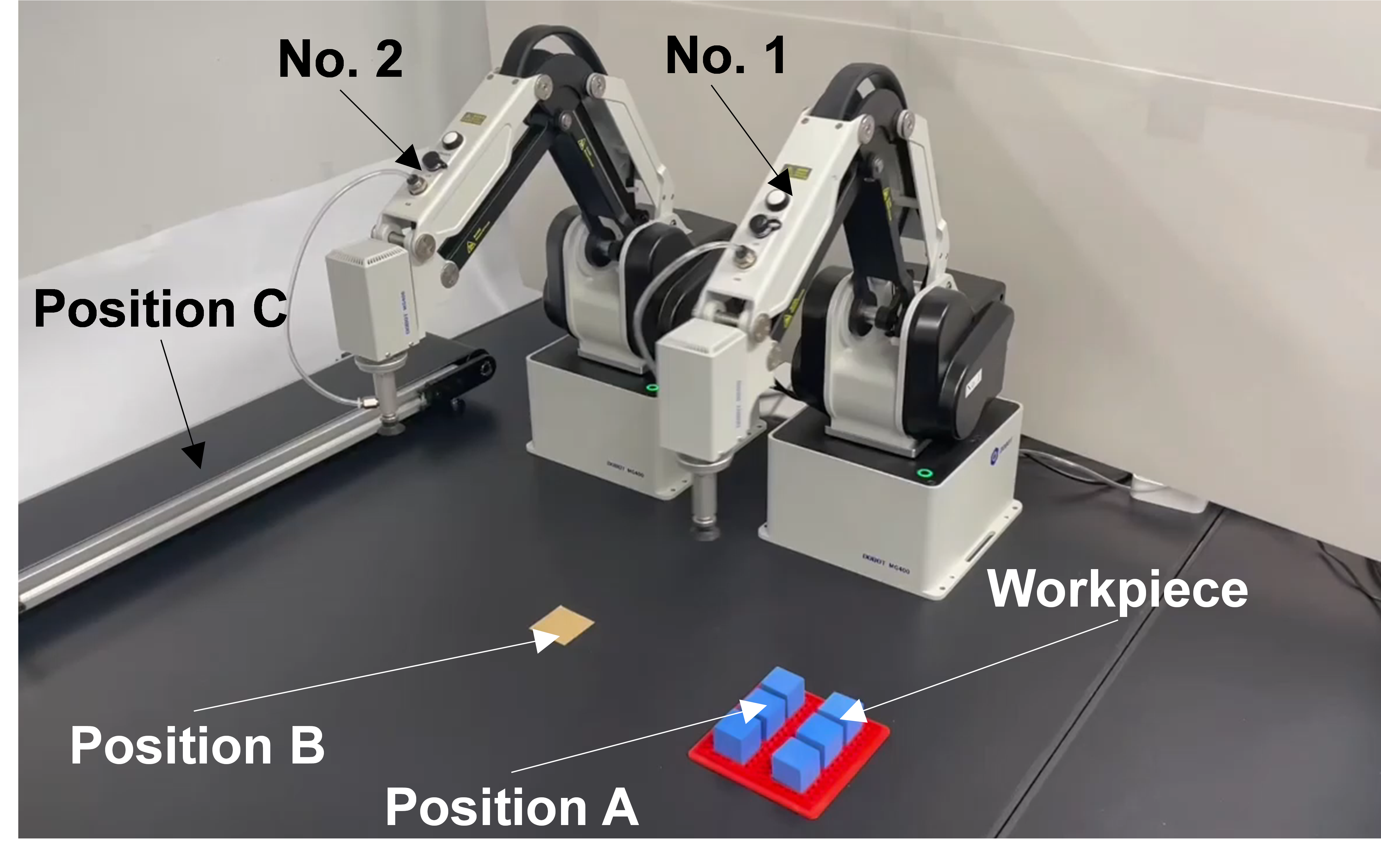
Fig. 1 Sequence control scene using SET and GET statements for handshake communication available in HCLS data.
Keywords: Hyper cutter location source data, Small-sized industrial robot, Convolutional neural network, Visual feedback control, Sequence control, Handshake communication
Biography: Fusaomi Nagata received the B.E. degree from the Department of Electronic Engineering at Kyushu Institute of Technology in 1985, and the D.E. degree from the Faculty of Engineering Systems and Technology at Saga University in 1999. He was a research engineer with Kyushu Matsushita Electric Co. from 1985 to 1988, and a special researcher with Fukuoka Industrial Technology Centre from 1988 to 2006. He is currently a professor at the Department of Mechanical Engineering, Faculty of Engineering, Tokyo University of Science, Yamaguchi, Japan and also a Dean of the Faculty of Engineering. His research interests include deep convolutional neural networks for visual inspection of resin molded articles, intelligent control for industrial robots and its application to machining process, e.g., robot sander, mold polishing robot, desktop NC machine tool with compliance control capability, machining robot with robotic CAM system, and 3D printer-like data interface for a machining robot have been developed for wood material, aluminum PET bottle mold, LED lens mold, foamed polystyrene, and so on.